

- Projekt Hrvatske zaklade za znanost, Uspostavni istraživački projekti, rok 2020-02
- Šifra projekta: HRZZ UIP-2020-02-5090
- Akronim: AOSeR
- Voditelj projekta: izv. prof. dr. sc. Stefan Ivić
- Članovi tima:
- dr. sc. Luka Grbčić, mag. ing. mech
- Ante Sikirica, mag. ing. mech
- Luka Lanča, mag. ing. mech.
- Karlo Jakac, mag. ing. mech.
Tema potrage i nadzora aktivno se istražuje već desetljećima. Nesigurna potraga u dvije dimenzije dobro je poznat problem koji su sredinom 20. stoljeća prepoznali i opisali Koopman [koopman1956theory1], [koopman1956theory2], [koopman1957theory3] i Stone [stone1975theory]. Spomenuti radovi pružaju čvrste teorijske temelje za navedeni problem pretraživanja te obrađuju problematiku vjerojatnosti raspodjele meta (objekata/ljudi koje se traži), kretanja tragača i njihova senzorskog raspona, definiraju senzorske modele i princip otkrivanja meta u uvjetima nesigurnosti za stacionarne i pokretne pretraživačke agente i mete te na kraju prezentiraju formulaciju optimizacijskog problema kojim je definirana putanja pretraživača.
Sljedeći pododjeljak pružiti će detaljan pregled postojećih algoritama za planiranje pretraživanja i pokrivanja. Prvo ćemo definirati i objasniti tri vezana i popularna istraživačka smjera u akademskim krugovima, a to su spektralna višestupanjska pokrivenost (Spectral Multi-scale Coverage), uzmičući horizont (Receding Horizon) i više-agenatna kontrola (Multi-agent control).
Planiranje trajektorija Spectral Multi-scale Coverage metodom
Na temelju prethodno spomenutih frontalnih istraživanja, uglavnom je istraživana stacionarna problematika, a samo je nekoliko istraživača razmatralo nestacionarne ciljeve u novijim publikacijama. Spectral Multi-scale Coverage (SMC) je multi-agentni algoritam kontrole koji osigurava zadanu gustoću prekrivanja [mathew2009spectral] kao što je prikazano na Slici 1(a). Osnovna ideja SMC-a je da navodi agente pomoću gradijenta zaglađene razlike između postignutog i zadanog polja prekrivenosti, a koristeći spektralne tehnike. Ove se spektralne tehnike oslanjaju na ergodična svojstva dinamičkih sustava [mathew2011metrics] koja osiguravaju konvergenciju pokrivenosti u vremenu.
Ova kontrola pokrivenosti područja korištena je za dvosmjerno kontinuirano i neizvjesno traženje meta u metodi Multiscale Adaptive Search (MAS) [hubenko2011multiscale] i u Spectral Multiscale Search (SMS) [surana2012coverage]. I MAS i SMS pristupi izvršavaju kontrolu agenta pretraživanja prema zadanoj vjerojatnosti raspodjele meta za neizvjesno otkrivanja nepomičnih meta. U MAS-u i SMS-u koriste se prilično realni modeli kretanja bespilotnih letjelica: dinamika drugog reda i Dubinsov model. Primjena SMC algoritma s UAV-om i eksperimentalna validacija korištenje letjelice kojima upravlja SMC / MAS istražena je u [mathew2013experimental].
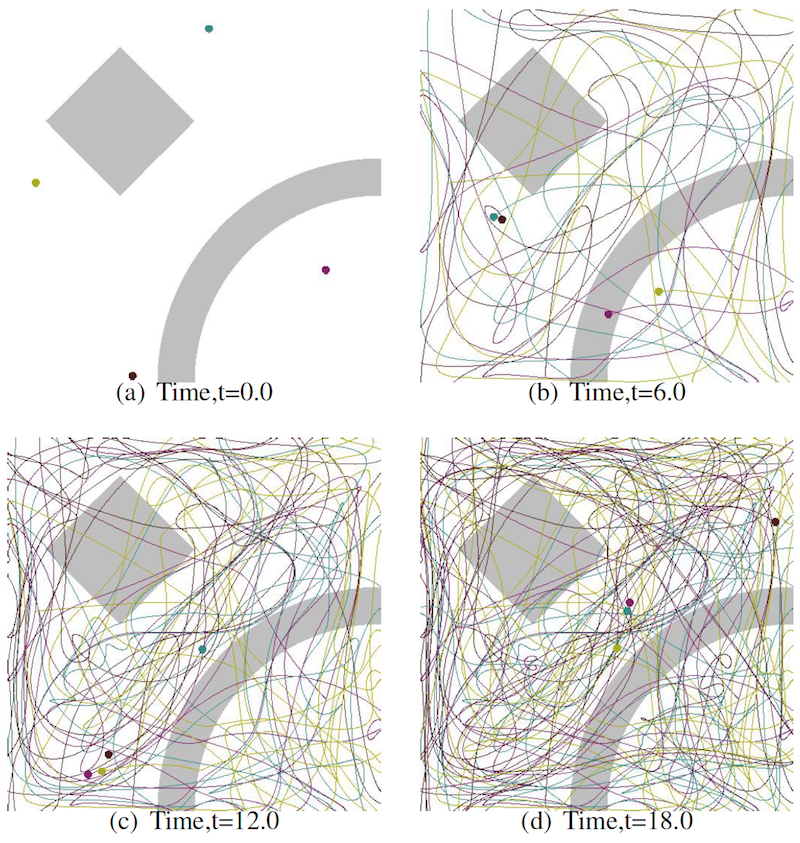
Konačno, proširenje SMC metode predloženo u [mathew2010uniform] nazvano Dynamic Spectral Multiscale Coverage (DSMC), prema najboljim saznanjima predlagatelja, jedina je metoda više-agentnog pretraživanja pokretnih meta prema variajbilnoj procjeni raspodjela vjerojatnosti prisutnosti mete. Metoda se oslanja na Lagrangianski model dinamike raspodjele meta koji se koristi za kontrolu pokrivanja s više agenata.
Planiranje trajektorija Receding Horizon metodom
Osim pristupa temeljenih na SMC-u, još jedna učestalo korištena metoda u problemima prekrivanja je Receding Horizon. Općeniti problem pokrivenosti razmatran je u [ahmadzadeh2006cooperative], [ahmadzadeh2007cooperative], gdje se u domeni s preprekom razmatra jednoliko pokrivanje. Neujednačena ciljana gustoća pokrivenosti za ergodično pokrivanje pomoću više agenata primjenom metode Receding Horizon razmatrana je u [mavrommati2017real], [ayvali2017ergodic].
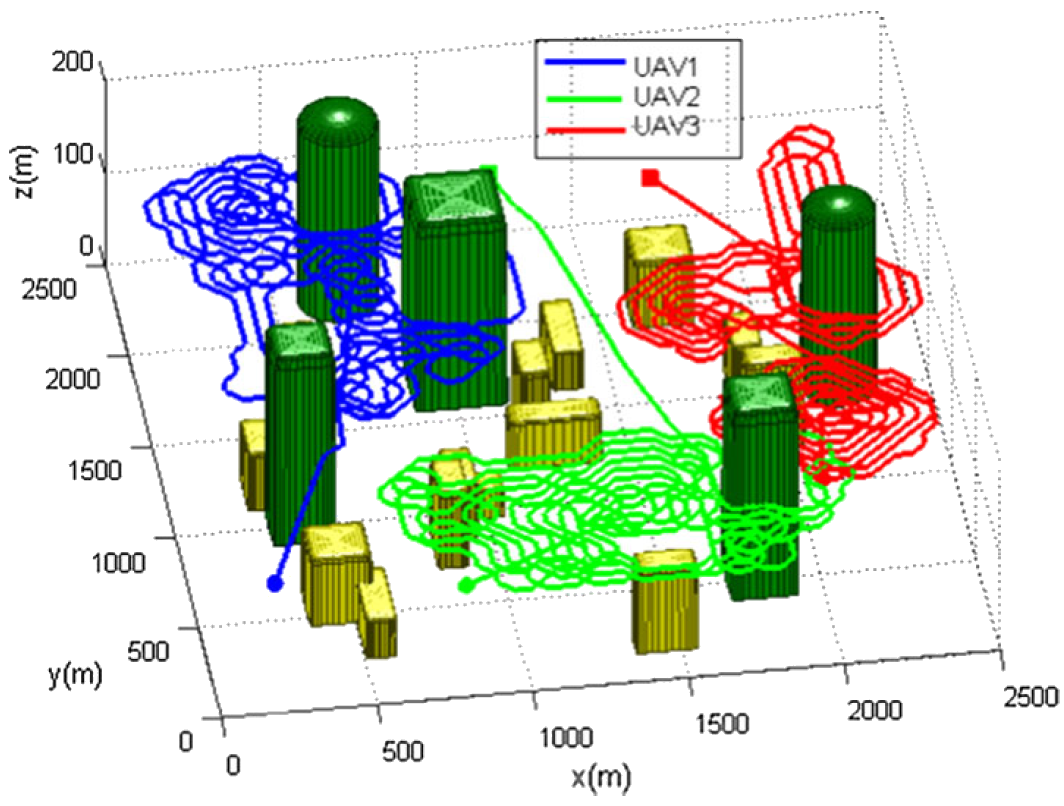
Receding Horizon kontrola i Gaussov model mješavine koriste se za određivanje optimalnih putanja više UAV-ova za traženje meta s poznatom raspodjelom, kao što je opisano u [yao2017gaussian] i prikazano na Slici 1 (b). Predložena metoda uključuje različita zanimljiva ograničenja kao što su izbjegavanje prepreka i sudara, te razmatra istodobni dolazak više UAV-a na određeno odredište.
Strategija planiranja pretraživanja i mapiranja koja se temelji na neizvjesnosti i na Receding Horizon metodi, predložena je u [papachristos2017uncertainty]. Metoda je namijenjena istraživanju nepoznatih okruženja, a pri tome minimizira nesigurnost lokalizacije agenta i praćenja orijentira.
Metoda pretraživanja meta predložena u [di2015potential] kombinira upravljački sloj mrežne topologije i sloj za planiranje kretanja UAV-a koristeći distribuiranu optimizaciju i Receding Horizon. Kooperativna pretraga s više agenata koristi raspodjelu vjerojatnosti mete i povijest detekcije pomoću UAV-a širom područja pretraživanja.
Ostali pristupi pretraživanju pomoću bespilotnih letjelica (UAV-a)
Ostale metode i algoritmi prilično se sporadično koriste za probleme pokrivanja ili pretraživanja pomoću UAV-a. Više agentna kontrola za postojano pokrivanje područja s promjenjivim intenzitetom pokrivanja i varijabilnim rasponom predložena je u [franco2016adaptive]. S obzirom na više agentnu konfiguraciju, predložena metoda povećava performanse pokrivanja i smanjuje potrošnju energije.
Više agentni kooperativni i decentralizirani algoritam za autonomno odlučivanje te za pretraživanje i mapiranje pomoću UAV-a predložen je u [johnson2013collaborative] te prikazan na Slici 2(a-b). Kontrola UAV-a postignuta je korištenjem automata konačnih stanja i Voronoijeve strategije mapiranja u kombinaciji sa sustavom razmjene informacija u stvarnom vremenu.
Algoritam za kontrolu gibanja bespilotnih vozila pri autonomnoj pograničnoj kontroli predstavljen je u [lau2014real]. Metoda brzorastućih slučajnih stabala (RRT) koristi se kao algoritam planiranja putanja, pri čemu su putanje dodatno optimizirane pomoću numeričkog upravljačkog rješavača temeljenog na nelinearnom programiranju.
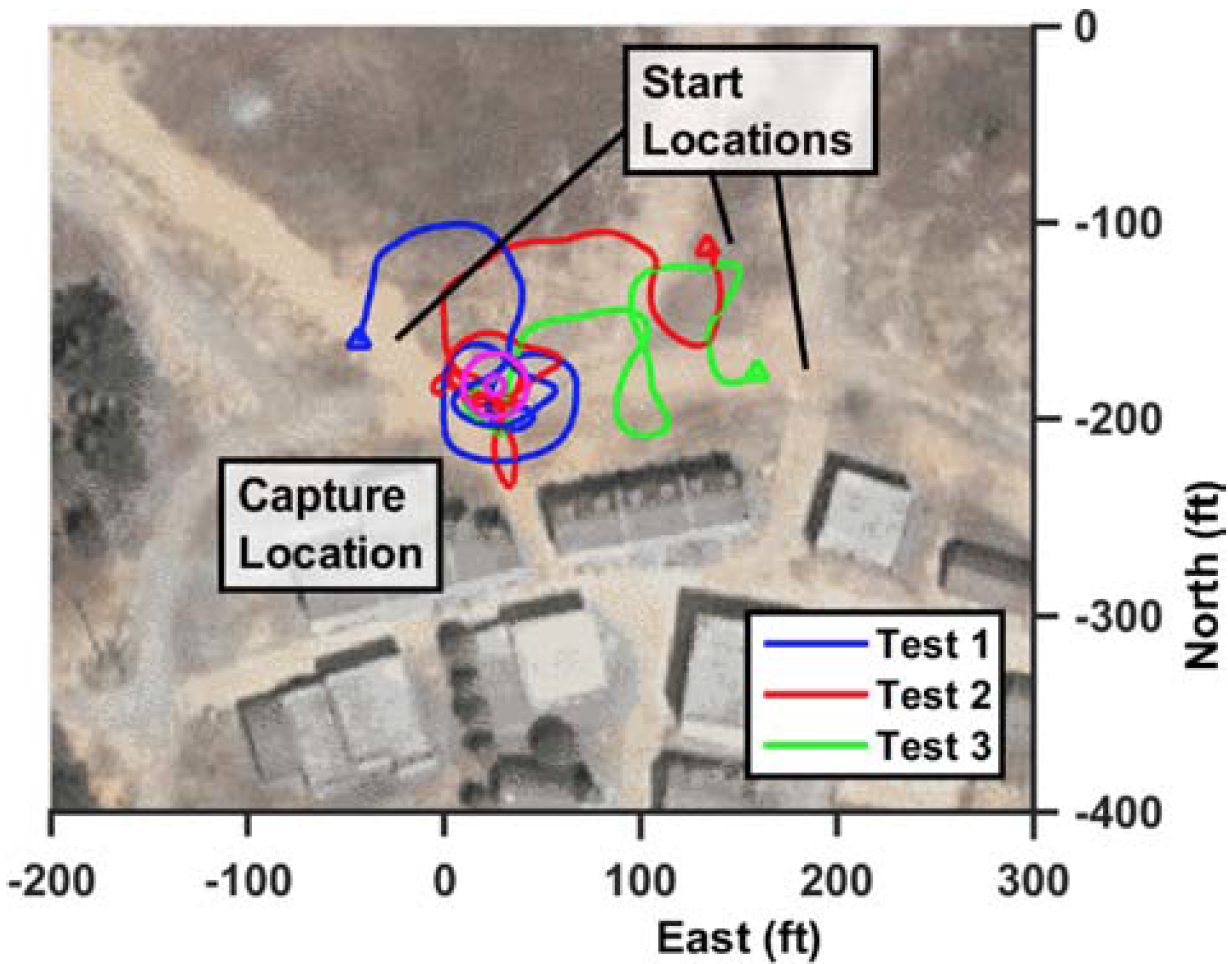
U [mooney2016collaborative] više bespilotnih letjelica koristi se za različite strategije pretraživanja i potrage. Osnovni koncepti metode temelje se na mapiranju i probabilističkoj pretrazi, a nadograđeni su modelima za otkrivanje lokacije skrivanja, procjenu izbjegavanja te strategijom traganja. Predložena strategija eksperimentalno je validirana pomoću dva autonomna helikoptera te je prikazana na Slici 2(c).


Pristup predstavljen u [bourgault2003optimal] razmatra problem pronalaska jedne mete koristeći opći Bayesov okvir. Uključuje kinematiku pretraživačkog vozila, model detekcije pomoću senzora i proizvoljni model kretanja. Predložena metodologija pokazala se uspješnom za pronalazak efikasnih putanja pretraživanja koje povećavaju vjerojatnost pronalaska mete u određenom vremenskom roku. Pristup modelira dinamiku gibanja meta i održava točnu funkciju gustoće vjerojatnosti prisutnosti meta.
Planiranje puta UAV-a za pretraživanje na oceanu opisano je u [rubio2004adaptive]. Provedene opsežne simulacije pretraživanja uključivale su adaptivno planiranje putanje gdje su u obzir uzeti realni vremenski podaci te su zajedno s podacima o performansama i stanju samog vozila korišteni za realizaciju autonomne oceanske pretragu sa smanjenim rizicima, troškovima i ograničenjima povezanim s misijama kojima rukovode ljudi.
Modeliranje gibanja mete pomoću strojnog učenja i CFD-a
Trenutno dominantni pristupi za rekonstrukciju strujnog polja zasnivaju se na statističkim interpolacijama postojećih skupova podataka. Metode korištene kod submezoskalnih problema koriste različite kovarijantne funkcije koje povezuju vremenske i prostorne podatke [goncalves2019]. Ovi modeli omogućuju predikciju vremenske promjene strujnog polja što je od presudne važnosti za procjenu položaja traženog objekta, no karakterizira ih visoki stupanj nesigurnosti. Novi pristupi koriste neuronske mreže za rješavanje problema nesigurnosti te eliminaciju tipičnih pogrešaka kod interpolacije, koje proizlaze iz pasivnog kretanja uređaja za mjerenje brzine strujanja [aksamit2019]. Rezultati za navedene modele su obećavajući i ukazuju na to da metode strojnog učenja mogu pružiti dovoljno točne predikcije o strujnom polju, čak i kod mjernih podataka male rezolucije, te tako pouzdano mogu predvidjeti položaj i putanju mete.
Procjena zanošenja plutajućih/površinskih i potopljenih plovila tipično se određuje pomoću CFD-a. Brojne novije studije [xiang2015, seemontini2017] koristile su CFD za predviđanje zanošenja i generiranje skupova podataka koji se koriste za povećanje primjenjivosti postojećih numeričkih algoritama ili za validaciju rezultata. U domeni pomorskog inženjerstva, CFD analize su još uvijek nezamjenjive, usprkos sve većoj primjeni strojnog učenja. Primjenjivost CFD-a za predviđanja zanošenja pri pretraživanju i spašavanju u kombinaciji s strojnim učenjem i dalje je neistražena.
Povezanost projektnog prijedloga s trenutnim stanjem u području istraživanja
HEDAC multi-agent area coverage control and trajectory planning
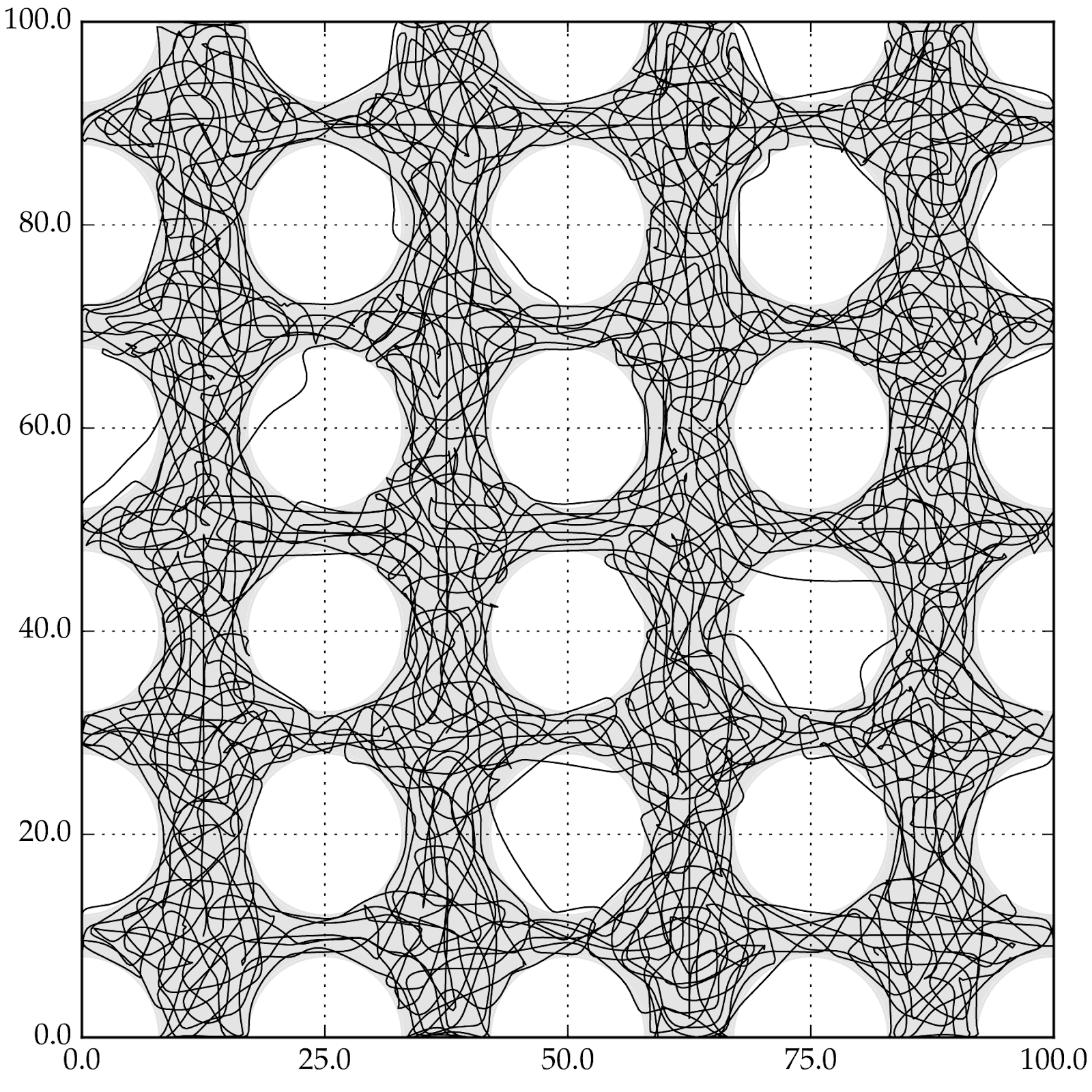
Metoda kontrole HEDAC objavljena u [ivic2017ergodicity] algoritam je kojim se osigurava pokrivanje ciljnog područja izvođenjem određenih općih radnji duž putanje agenata pokrivanja. Ključna ideja metode je potencijalno polje, čiji gradijent upravlja smjerom pretraživača. Potencijalno polje regulira se parcijalnom diferencijalnom jednadžbom provođenja topline, gdje je potencijalno polje predstavljeno temperaturom, a izvor topline odgovara razlici između polja ostvarenog i ciljanog polja pokrivanja. Regije s nedostatkom pokrivanja zagrijavaju se, podižući temperaturu i posljedično privlače agente. Jednadžba provođenja topline, koja regulira potencijal, rješava se metodom konačnih razlika (FDM) na uniformnoj pravokutnoj mreži, dok se obične diferencijalne jednadžbe gibanja agenata rješavaju pomoću Eulerove metode. Ostale numeričke tehnike potrebne za dovršavanje HEDAC algoritma su: bilinearna interpolacija, numerički proračun potencijalnog gradijenta polja i konvolucija osnove funkcije pokrivanja duž putanje agenata. Putanje agenata koje se postižu HEDAC-om su deterministične, ali kaotična (slika 3). Pokazano je da HEDAC nadmašuje gore spomenuti SMC i uobičajene metode pokrivanja (Lawnmower).
Primjena HEDAC-a na pretraživanje pomoću više agenata u neizvjesnim uvjetima prikazana je u [ivic2019heterogeneous]. Ovdje je izvor topline prilagođen tako da predstavlja distribuciju vjerojatnosti neotkrivene mete, pa se agenti usmjeravaju prema regijama u kojima je otkrivanje meta više obećavajuće. Uključen je proizvoljni prostorni i eksponencijalni vremenski model osjeta za realnije akcije osjeta i detekcije. Nadalje, realnije gibanje agenta postiže se Dubinsovim modelom gibanja, što je prilično dobra aproksimacija dinamike leta UAV-a (slika 4). Pokazano je da upotreba HEDAC-a smanjuje vrijeme pretraživanja te postiže istu vjerojatnost otkrivanja za otprilike upola manji vremenski period u usporedbi s konvencionalnim metodama (Slika 5). U ovom radu, HEDAC je proširen kako bi se omogućilo upravljanje heterogenim agentima pretraživanja s obzirom na parametre pokreta (brzina, minimalan radijus okretanja) i senzor detekcije (funkcija brzine otkrivanja). Ova značajka omogućuje uspješnu uporabu HEDAC-a s nizom bitno različitih agenata, čak i kombiniranjem UAV-ova, bespilotnih kopnenih vozila (UGV-ova) ili bespilotnih (morskih) površinskih vozila (USV-ova). Validirana skalabilnost predloženog okvira pretraživanja s više agenata pokazala je kako je metoda sposobna kontrolirati niz UAV-a dok je učinkovitost pretraživanja gotovo proporcionalna broju korištenih pretraživača. Nadalje, za pretraživanje u stacionarnim uvjetima kontrola kretanja HEDAC-om pokazala je superiornost u usporedbi s dvije najsuvremenije metode, kako u pogledu učinkovitosti pretraživanja, tako i računalne učinkovitosti.
Imajući u vidu performanse HEDAC-a za statičke uvjete, kao što je pokazano u dosad objavljenim radovima, postoji veliki stupanj sigurnosti da će platforma pretraživanja temeljena na HEDAC-u nadmašiti postojeće najsuvremenije metode. HEDAC metoda nudi fleksibilnost, robusnost, jednostavnost i vrlo visoku učinkovitost, što daje snažne temelje predloženom istraživačkom projektu.


Druga primjena HEDAC-a istražena je u [ivic2017fully] gdje se poljoprivredno prskanje razmatalo kao problem prekrivanja s više UAV-a. HEDAC metoda kontrole uspoređena je s konvencionalnom metodom planiranja Lawnmower u tri numerička ispitivanja: dva koja se temelje na jednostavnim geometrijama i algebarski definiranoj ciljanoj gustoći prskanja, a jedna na temelju mape bolesti usjeva u stvarnom svijetu. Rezultati pokazuju da su HEDAC kontrolirani UAV-ovi znatno brži u postizanju ciljane gustoće prskanja od onih koji rade s planiranjem puta Lawmower-om, istovremeno stvarajući gustoću prskanja usporedive točnosti. Nadalje, u usporedbi s Lawnmower kontroliranim prskanjem, HEDAC prskanje obično ublažava prekomjerno prskanje za približno 3-8 %, postižući praktično jednake razine pogreške gustoće prskanja. Shodno tome, može se opravdano pretpostaviti da bi u stvarnim primjenama HEDAC-om upravljani UAV rojevi za raspršivanje uvelike nadmašili UAV-ove koji rade s Lanwmower planiranim putanjama.
Interpolacija polja brzina strojnim učenjem
Iznimno je važno ubrzano reagirati kod traženja i spašavanja u morskom okruženju s obzirom na to da su uvjeti dinamički, a sam problem karakterizira veći stupanj nesigurnosti. Da bi se predvidjelo kretanje objekta ili osobe koju je potrebno spasiti esencijalno je znati trenutno stanje oceanskih ili morskih struja u svrhu predviđanja budućeg stanja. Predviđanje dinamike kretanja morskih struja može se napraviti koristeći metode iz računarske dinamike fluida (RDF) s obzirom na to da strujama vladaju fizikalni zakoni kretanja fluida. RDF model mora biti validiran eksperimentalnim podacima da bi mogao biti dovoljno pouzdan za upotrebu, pravilni rubni uvjeti na domeni strujanja i model turbulencije strujanja moraju biti testirani te za iste utvrđena razina točnosti. S obzirom na to da su RDF modeli proračunski zahtjevni te se ne mogu u klasičnom smislu računati na tradicionalnim stolnim računalima, a brza reakcija je iznimno važna, moguće je generirati efikasni model strojnim učenjem koji je istreniran na RDF simuliranim rezultatima (u [grbvcic2020efficient] RDF je generirao podatke koji su se koristili za model strojnog učenja). Za rješavanje ovog problema nužno je poznavati površinska strujanja kako bi model strojnog učenja efikasno generirao polje površinskih brzina koje bi se koristilo za predviđanje kretanja mete. Moguće metode za kreiranje modela strojnog učenja su Slučajne Šume, Umjetne Neuronske Mreže itd. Nedavna istraživanja pokazala su validnost ovih pristupa u predviđanju kretanja fluida [ladicky2015], [brunton2020]. Ulazni podaci za model strojnog učenja bile bi mjerne točke brzina u domeni u kojoj struji fluid te bi za istu domenu polje brzina bilo interpolirano modelom strojnog učenja.
Opisani pristup koji koristi plutajuće senzore (driftere), RDF model i model strojnog učenja za rekonstrukciju polja kretanja fluida u realnom vremenu predstavlja zaokruženu i jedinstvenu cjelinu koja obećava odlične rezultate, što je već i pokazano u preliminarnoj studiji u okviru završnog rada na preddiplomskom studiju unutar naše istraživačke skupine [mirkovic2019flow]. Kalibriran, analiziran te eksperimentalno potvrđen model može poslužiti kao vrlo koristan alat koji potencijalno ima mnoge druge primjene.
Sinteza podataka za robusnu procjenu stanja, otkrivanje i praćenje meta
Iako nije jedan od primarnih ciljeva, istraživanje vezano uz fuziju podataka i otkrivanje meta je nužno radi funkcionalnog autonomnog više-agentnog sustava pretraživanja. Planiramo koristiti suvremene pristupe koji će biti poboljšani u skladu s zabilježenim rezultatima na kopnu i moru. Budući da je planirano provođenje eksperimenata, čvrsto smo uvjereni da će se korištena metodologija biti adekvatno rafinirana i specijalizirana za pretraživanje u stvarnom scenariju.
Sinteza podataka može biti dvostruka:
(i) fuzija senzora za robusnu procjenu stanja UAV-a (poza, bočna brzina, položaj i brzina vjetra). UAV nosi GPS prijemnik, MEMS visinomjere, jedinicu za inercijalno mjerenje (IMU) i kompas kao što je prikazano na slici 6. Ova su mjerenja čvrsto povezana sa stohastičkim filtriranjem (npr. Extended Kalman filter) koji je u stanju osigurati visoku razinu ažuriranja i preciznu procjenu stanja. Točna procjena pomaka kamere izuzetno je važna za uspješno praćenje cilja uslijed kretanja UAV-a. Vremenski sinkronizirani IMU i temeljni model dinamike UAV-a može se iskoristiti za procjenu kretanja unutar okvira EKF. Ova procjena tada daje dobre ciljne kandidate za sljedeće ciljne pratioce. Sljedeći odjeljak detaljnije govori o ovom aspektu.
(ii) Integracija i povezivanje podataka ostvarenih pomoću tradicionalne i toplinske kamere također nije trivijalan zadatak zbog velike razlike u izgledu rezultantnih slika pa je shodno tome teško pronaći podudarnosti između istih. Pod pretpostavkom da je udaljenost optičkih elemenata (leća) sustava kamera dovoljno mala s obzirom na udaljenost od objekta, te imamo poznate ciljeve, fuzija podataka o slici (tj. poravnavanje slike) može se postići kalibracijom dviju kamera [furgale2013unified] kako bi se procijenila geometrijska kalibracija kamere (intrinzična i ekstrinzična) [vempati2015victim].

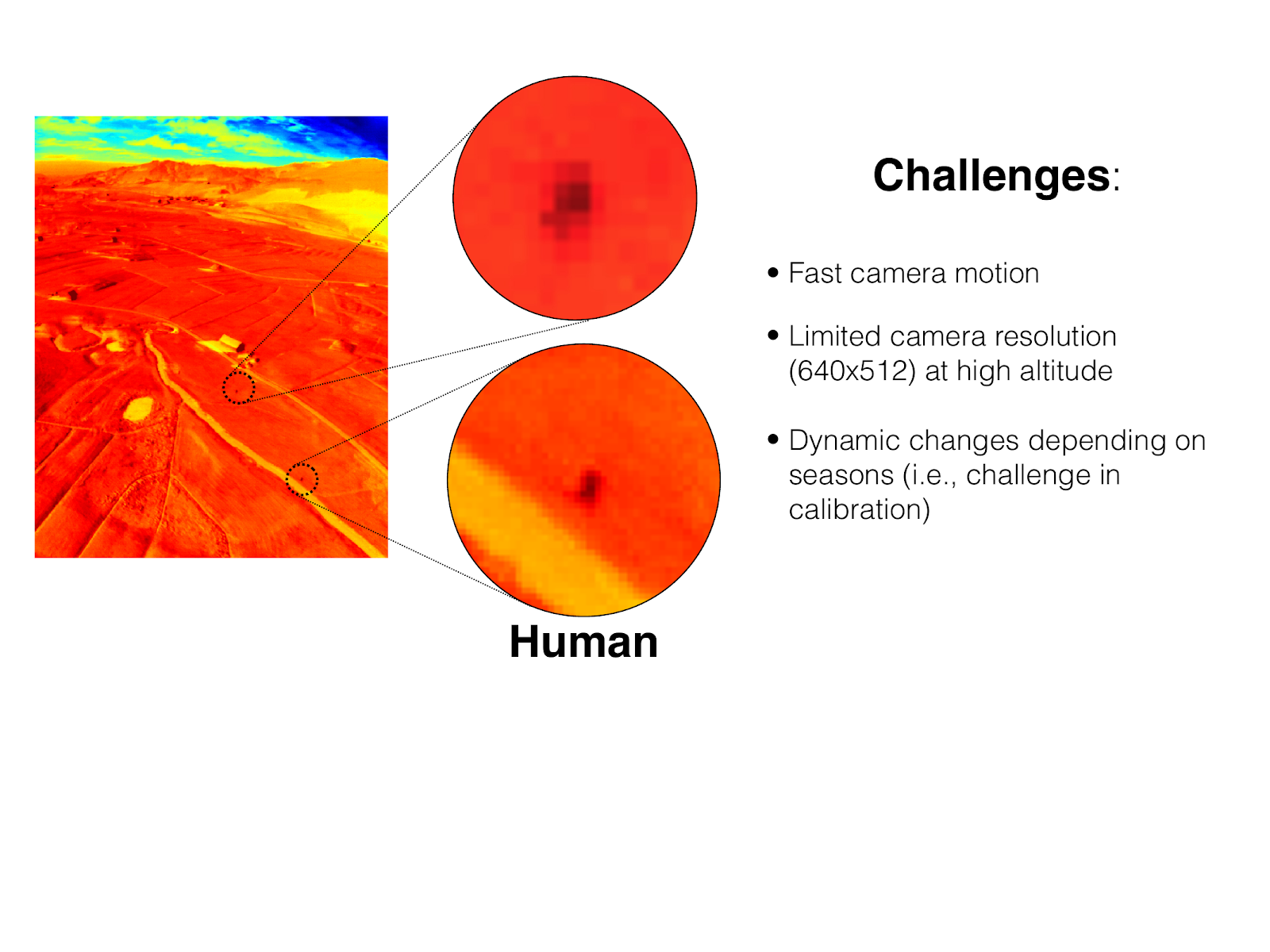
Iako je detekcija meta (ljudi) u toplinskim slikama visoke rezolucije usko povezana s detekcijom na slikama proizašlima temeljem vidljive svjetlosti, korištenje toplinskih slika ima specifične karakteristike. U prvom koraku segmentacije, svojstva pozadine su bitan faktor: okolina je često na različitoj temperaturnoj razini od ljudi koje je potrebno detektirati, te je moguće čak i jednostavnim “rezanjem” graničnih vrijednosti postići uspješne rezultate. Međutim, za robustan rad, ciljni detektor mora se moći nositi sa sličnim pozadinskim temperaturama, što čini segmentaciju jednako izazovnom kao u domeni vizualnog svjetla kao što je prikazano na slici 7. U literaturi se prijedlozi za otkrivanje i praćenje žrtava u termičkim slikama uvelike oslanja na oduzimanja (eliminaciju) pozadine. Zbog niskog omjera signal / šum i refleksije oko vrlo vrućih i vrlo hladnih objekata, pravilno filtriranje slike će biti presudno.
Na Slici 8 prikazan je razvijeni detektor žrtava koji integrira gradijentne slike i podatke o temperaturi za početno otkrivanje žrtava [vempati2015victim], [kummerle2016real]. Kao drugi sloj za otkrivanja žrtava obično se koristi klasifikator: on se mora nositi s vanjskim promjenama parametara kamere, kao i s različitim položajima i djelomičnim okluzijama ljudi koje treba detektirati.

Metodologija
Krajnji cilj predloženog projekta je izrada autonomnog sustava za pretraživanje mete u nestabilnim okruženjima kao što su more ili oceanska površina. Kako bi se postigao taj cilj, potrebno je realizirati mnogo različitih cjelina istraživanja (Ciljevi projekta opisani u odjeljku e. Plan rada).
Cilj 1. Procjena distribucije mete
Procjena dinamike distribucije mete u oceanskoj struji oslanja se na računalnu simulaciju advekcijskog odljeva uzrokovanog morskim strujama. Postoje dva različita modela pristupa koji će se istražiti u predloženom projektu: lagrangijanski i eulerovski pristup. Lagrangijanski pristup opisuje gibanje pasivnih uzoraka u polju brzine i modelira se korištenjem sustava običnih diferencijalnih jednadžbi dok se gustoća vjerojatnosti procjenjuje gustoćom pasivnih uzoraka. Eulerov pristup omogućava izravno modeliranje advekcije skalarnog polja (gustoća mete) s parcijalnom diferencijalnom jednadžbom advekcije. Oba pristupa imaju prednosti i nedostatke u pogledu preciznosti i računalne učinkovitosti. Navedene karakteristike će se istražiti provođenjem računalnih simulacija u različitim nestabilnim uvjetima i domenama te će se usporedbom odlučiti koji će se pristup koristiti u sljedećim koracima istraživanja. Početni modeli bit će implementirani u Python ekosustav za znanstveno računarstvo (Python / Numpy / Scipy / Matplotlib), a po potrebi konačni će se modeli implementirati u C ++ koristeći odgovarajuće knjižnice (OpenFOAM).
Cilj 2. Procjena brzine na morskoj površine mjerenjem u raspršenim točkama
Neovisno o primijenjenom pristupu za predikciju dinamike mete, uspjeh će izravno ovisiti o točnosti nestacionarnog polja brzine na površini mora. Motivirani financijskim ograničenjima i jednostavnošću ugradnje, odlučili smo procijeniti brzinu morske površine koristeći mjerenja s plutajućih senzora razasutih po domeni pretraživanja. 20 senzora omogućit će nam kontinuirano procjenjivanje brzine morske površine na 20 nefiksiranih lokacija u području pretraživanja. Podaci prikupljeni od strane senzora koristili bi se (zajedno s dobivenim RDF simulacijama) za treniranje modela strojnog učenja kako bi se postigla brza aproksimacija brzine polja morske površine za ciljanu pretraživačku domenu. Rezultantna polja površinske brzine modelirala bi se RDF modelom koji bi bio izrađen pomoću validiranog RDF rješavača otvorenog koda OpenFOAM, baziranog na metodi konačnih volumena. Model strojnog učenja stvorio bi se pomoću Python knjižnica za duboko učenje TensorFlow i Scikit-learn. Zbog veličine domene problema i složene dinamike morskih struja, RDL simulacije i obuka modela strojnog učenja zahtijevaju mnogo računske snage. Za obuku modela koristila bi se NVIDIA DGX stanica s 4 Tesla Volta GPGPU kartica, dok će se RDF simulacije izvoditi korištenjem računalnih resursa visokih performansi (HPC) Centra za napredno računanje i modeliranje Sveučilišta u Rijeci. Ovakva distribucija zadataka je nužna s obzirom na to da su ML problemi pogodni za masovnu paralelizaciju na multi-GPU sustavima. S druge strane, RDF simulacije su još uvijek ograničene na klasične MPI i OMP multiprocesorske sustave. Navedenu problematiku stoga nije moguće u adekvatnom vremenskom razdoblju razriješiti na klasičnim računalnim sustavima te su HPC resursi neophodni.
Cilj 3. Robusna kontrola bespilotnih letjelica za oceanske pretrage i spašavanje
UAV sustav treba pripremiti za kontrolu kretanja visokog stupnja. Višestruki UAV-ovi će se regulirati središnjim računalom koristeći HEDAC algoritam. Implementacija algoritma pretraživanja i kontrole kretanja izvest će se pomoću DJI-jevog SDK-a koji omogućava visoku i nisku razinu kontrole nad DJI multirotornom platformom Matrice 200 i pripadnom opremom. HEDAC omogućuje uporabu heterogenih UAV-ova (i letačkih i senzorskih karakteristika), koji će se implementirati i testirati pomoću predložene opreme. Nadalje, HEDAC funkcionalnost bit će proširena uključivanjem i isključivanjem UAV-ova iz pretraživanja.
Cilj 4. Razvoj numeričkih rješavača za HEDAC
Heat Equation Driven Area Coverage (HEDAC) je model višeagentne kontrole kretanja koja se temelji na parcijalnoj diferencijalnoj jednadžbi topline koja se može riješiti pomoću različitih tehnika. Trenutno se HEDAC izvodi koristeći metodu konačnih razlika (FDM), što je najjednostavnija tehnika i lako se provodi, ali donosi neke nedostatke (npr. domena treba biti pravokutna). Uporaba metode konačnih volumena (FVM) ili metode konačnih elemenata (FEM) ponudit će još veću točnost i mogućnost primjene metode upravljanja na scenarijima s nepravilno oblikovanim domenima. Takav pristup potencijalno donosi smanjenje nužne računalne domene i posljedično poboljšanje računalne učinkovitosti. Brži način upravljanja omogućuje UAV-ima češće slanje uputa za smjer. Ciljani tempo je minimalno 1 instrukcija svake 3 sekunde, što je zasigurno ostvarivo, ali ovisi o veličini domene i brzini UAV-a. Sve će se validacije i usporedbe u ovom dijelu istraživanja provoditi računski.
Cilj 5. Razvoj sustava za fuziju senzora i detekciju meta
Istražit će se dvije senzorske mogućnosti za detekciju mete: vid i toplinsko snimanje. Iako će svaki UAV biti opremljen vizualnom kamerom visoke rezolucije, imajući u vidu financijsku racionalnost, u proračun je uključena samo jedna toplinska kamera. Prema mišljenju podnositelja zahtjeva, ovo je dovoljno za istraživanje prednosti upotrebe toplinskih kamera (ili kombinacije vida / topline) za otkrivanje ljudi. Detekcija ljudskih meta provest će se na slikama koje će se prikupljati na središnjoj prijenosnoj radnoj stanici pomoću prethodno istreniranog algoritma strojnog učenja za detekciju. Računalna jedinica (DJI Manifold 2) će se upotrijebiti za ispitivanje mogućnosti potpuno autonomne detekcije (otkrivanje se provodi na UAV-u).
Cilj 6. Eksperimentalna validacija kopnene pretrage u stacionarnim uvjetima
Tijekom predloženog projekta provest će se nekoliko (najmanje dva kako je predviđeno projektnim planom) temeljnih (stacionarnih) eksperimenata pretraživanja. U početku će scenarij pretraživanja uključivati umjetne mete svijetle boje koje su raštrkane u skladu s zadanom ciljanom gustoćom na jednoličnoj pozadini poput travnatog polja. U kasnijim eksperimentima otkrivanje će se testirati na lutki ili na stvarnim ljudima (volonteri, vidi odjeljak o etici). U jednom pretraživanju može se koristiti mnogo meta kako bi se dobili detaljniji i vrijedniji rezultati. Zabilježit će se i okolišni uvjeti poput brzine vjetra, temperature i svjetline. Dobiveno otkrivanje i kretanje UAV-a statistički će se obraditi i usporediti s računalnim simulacijama za isti scenarij.
Cilj 7. Eksperimentalna validacija oceanske potrage i spašavanja
U drugom dijelu predloženog razdoblja izvođenja projekta provest će se glavni zadatak projekta – simulacije pretraživanja (u nestabilnim uvjetima) na morskoj površini. Planiraju se provesti dva takva eksperimenta. Eksperimentima će prethoditi inicijalna kalibracija opreme i općenita validacija. Slično kopnenim eksperimentima, početni scenariji pretraživanja uključivat će umjetne mete poput svijetlih plastičnih kuglica razbacanih po morskoj površini. U drugom morskom eksperimentu koristit će se plutajuće lutke ljudske veličine i izgleda. Osim meta, u morskom će eksperimentu biti korišteni plutajući senzori kako bi približno jednoliko pokrili domenu pretraživanja. Brzina na povšini mora, s obzirom na lokacije senzora, neprekidno će hraniti model strojnog učenja za procjenu morske površine, inicijalno za treniranje modela strojnog učenja, a kasnije za procjenu / rekonstrukciju potrebnog polja brzine. Procjena polja brzine bilježit će se i analizirati neovisno o podacima pretraživanja i otkrivanja. Usporedba izmjerenih podataka sa simuliranim podacima za isti scenarij pretraživanja potvrdit će učinkovitost i upotrebljivost predložene metodologije višeagentnog pretraživanja.
Učinak istraživanja
Znanstvena važnost i utjecaj
Višeagentni sustavi dinamično su i rastuće područje istraživanja s utjecajem na mnoge druge discipline znanosti i tehnologije. Upravljanje takvim sustavima jedan je od najvažnijih i intrigantnih problema koji se pojavljuju u različitim oblicima, ovisno o primjeni. Jedan od takvih problema kontrole je kontrola prekrivanja područja s više agenata koja se usko odnosi na mnoge stvarne aplikacije u tehnologiji pretraživanja i nadzora.
Predložena metodologija za oceansku potragu i spašavanje nudi vrhunski napredak u modernim aplikacijama s više agenata. Za razliku od sličnih pokušaja istraživanja u ovom polju, algoritam upravljanja HEDAC nudi robusnost, fleksibilnost i učinkovitost temeljenu na prilično jednostavnim temeljnim idejama. Daljnji napredak u HEDAC kontroli više agenata poslužio bi kao značajno poboljšanje u teoriji i metodologiji pretraživanja, ali i u kontroli više agenata općenito.
Napredak u kontroli pretraživanja mogao bi biti od koristi u drugim poljima inženjerstva, prirodnim ili čak društvenim znanostima, primjerice, nadgledanje i praćenje populacija životinja radi bilježenja i analize dinamike kretanja u određenim područjima od interesa, kao što su nacionalni parkovi, divljina, uzgoj stoke na otvorenom prostoru. Razmatranje drugih oblika nestacionarnih ciljeva, poput jednostavne procjene ljudskog kretanja u gomili i na javnom okupljanju moglo bi donijeti poboljšanja u cjelokupnoj javnoj sigurnosti.
Očekivani rezultati i plan širenja
Metodološka istraživanja u okviru ovog projekta rezultirat će znanstvenim publikacijama objavljenim u vodećim časopisima u području i predstavljenim na relevantnim konferencijama. Uz to, pružit ćemo i alate otvorenog koda i javno dostupne skupove podataka koji će pridonijeti zajednici i omogućiti rješavanje mnogih problema vezanih uz kontrolu prekrivanja s više agenata pomoću HEDAC-a.
Širi utjecaj
Rezultati predloženog istraživanja poslužit će kao dokaz koncepta za uporabu rojeva autonomnih bespilotnih letjelica u nestabilnim okruženjima, ostavljajući malo sumnje u mogućnost korištenja ove tehnologije u mnogim industrijskim područjima. S obzirom na prilično jednostavnu integraciju HEDAC kontrole kretanja rojeva s UAV temeljenom tehnologijom otkrivanja i praćenja ciljeva, ne postoje očigledne prepreke za primjenu takvog sustava u stvarnim zadacima.
Istraživanje bi pružilo važan uvid u trenutno stanje i potencijal potpuno autonomnih heterogenih višeagentnih UAV sustava. Na temelju provedenih istraživanja i eksperimenata otvorili bi se jasni putevi istraživanja koji bi vodili ka primjeni sličnih sustava koji bi osim pretraživanja služili i drugim ciljevima. To uključuje, primjerice, kontinuirano praćenje požara u stvarnom vremenu, nadzor prometa, nadgledanje gužve i razne druge zadatke nadzora. Mnogi stacionarni nadzorni sustavi kojima upravljaju ljudi mogli bi biti zamijenjeni (ili barem podržani) s potpuno automatiziranim UAV sustavima.
Nadzor i praćenje zagađenja još je jedno područje primjene predloženog sustava. To je važna ekološka tema i brzi odziv u slučaju onečišćenja oceana/mora je od velike važnosti. Ovaj bi se sustav mogao koristiti za procjenu potencijalne putanje onečišćujućih tvari u slučaju nesreće (izlijevanje nafte s broda/platforme, zagađenje mikroplastikom itd.). Lociranje izvora onečišćujućih tvari pomoću unatražnog i kontinuiranog praćenja ispuštanja kako bi se spriječila daljnja ekološka šteta izuzetno je važno i moguće uz manje izmjene predloženog okvira pretraživanja.
Radni plan
Primjena HEDAC metode kontrole već je uspješno dokazana za pretraživanje pomoću heterogenog skupa agenata u nesigurnim, ali stacionarnim uvjetima. Nadalje, uvjereni smo, na temelju preliminarnih modifikacija i testiranja, da će HEDAC metoda uspješno regulirati pretraživanje čak i u nestacionarnim uvjetima. Stoga je ključni zadatak predloženog projekta primjena i procjena HEDAC metode višeagentnog upravljanja na stacionarnim i nestacionarnim modelima raspodjele ciljeva, poput onih koji se nalaze u scenarijima pretraživanja tla i oceana. Zadatak pretraživanja tla uzima u obzir prilično stabilne uvjete (npr. sporo hodajući ljudi) kako bi se potvrdili funkcionalni podzadatci kao što je prikazano na Slici 10.

Scenarij pretraživanja oceana će se baviti izazovnijim i praktičnijim problemima; predviđanjem nestacionarnog stanja polja brzina morskih struja mjerenjem pomoću multi-modalnih senzora (tj. GPS plutači i povijesni/simulirani podaci o strujnim poljima) kao što je prikazano na Slici 11.
Za prevladavanje spomenutih izazova potrebno je savladati sljedeće zadatke:
- Procjena distribucije meta
- Procjena brzina na morskoj površini pomoću mjerenja raštrkanih točaka
- Robusna kontrola UAV-a za oceanske pretrage i spašavanje
- Razvoj učinkovitih rješavača za HEDAC i njihova evaluacija
- Razvoj okvira praćenja meta i sinteze senzora
U nastavku je detaljnije razrađen svaki zadatak te dva terenska eksperimenta (tj. scenariji pretraživanja na kopnu i moru).

Ciljevi
Cilj 1. Modeliranje distribucije meta u izmijenjivim uvjetima
Budući da je precizno predviđanje distribucije vjerojatnosti prisutnosti mete(skraćeno, distribucija mete) presudno za uspješne i učinkovite misije pretraživanja, predlažemo sljedeće pristupe procjene distribucije mete kao proširenje na naš prethodni rad opisan u Odjeljku B.
Naš pristup bi se trebao oslanjati na dva poznata ulaza: početnu procijenjenu distribucije meta i model gibanja te distribucije temeljen na polju brzina morskih struja. Budući da razmatramo pretraživanje u dvodimenzionalnom prostoru, distribucija meta je dvodimenzionalno skalarno polje koje je potrebno na odgovarajući način modelirati i izračunati. Plan je razmotriti dva moguća pristupa za proračun distribucije meta: langrangianski i eulerovski pristup.
U lagrangianskom pristupu skup pasivnih čestica (koje ne utječu na strujanje) distribuira se u promatranom području prema početnoj procjeni distribucije meta i one se pomiču procesom advekcije, tj. brzinom mora. Advekcija svake čestice modelirana je sustavom dvaju običnih diferencijalnih jednadžbi prvog reda, čime se dobije puna putanja čestice. To omogućava prilično brzu procjenu distribucije meta u bilo kojem trenutku izračunavanjem distribucije adveciranih čestica. Mogući nedostatci ovog pristupa su zahtjev za velikim brojem čestica kada se razmatra dugotrajna advekcija i zamršeni tokovi.
Eulerovski pristup nudi drugačiju perspektivu, s prednostima i nedostacima u odnosu na lagrangianski pristup. Advekcija distribucije meta u eulerovskom pristupu se modelira izravno parcijalnom diferencijalnom jednadžbom koja regulira polje distribucije meta u vremenskoj i dvije prostorne dimenzije. Iako rješavanje takvog modela gibanja iziskuje zahtjevniji numerički tretman, izravna regulacija distribucije meta nudi mnogo zanimljivih i možda isplativih istraživačkih pravaca. Jedan takav smjer koji planiramo razmotriti u ovom projektu je dodavanje difuzijskih pojava u parcijalnoj diferencijalnoj jednadžbi advekcije. Difuzija omogućava razmatranje nesigurnosti u polju brzina strujanja, što bi se zasigurno trebalo tretirati kao nesigurno, jer se strujanje mjeri ili simulira s određenim stupnjem netočnosti. Nadalje, budući da je fenomen difuzije uvijek prisutan u stvarnim tokovima, navedeni pristup će omogućiti da se u modelu dinamike distribucije meta uključe realniji i točniji rezultati. Druga prednost eulerovskog pristupa je mogućnost izravnog modeliranja distribucije vjerojatnosti pojavljivanja neotkrivenih meta koja kombinira procijenjenu distribuciju meta i prethodno izvedene akcije pretraživanja. Implementacija takvog modela doprinijeti će točnosti rezultata, posebno pri procjeni distribucije meta pri strujanjima velikih brzina.
Cilj 2. Procjena brzine na morskoj površine mjerenjem u raspršenim točkama
Potrebno je poznavati dinamiku distribucije vjerojatnosti prisutnosti nestabilne mete kako bi se iskoristila u HEDAC višeagentnoj kontroli za traženje mete. Pri pretraživanju mora najčešće se ne može u stvarnom vremenu sa sigurnošću definirati površinska brzina strujanja, što je ključno za izračunavanje distribucije kretanja mete. Jedan od zadataka planiranih za ovaj projekt je istraživanje uporabe interpolirane brzine na morskoj površini dobivene mjerenjima u točkama, tj. pomoću raštrkanih plutajućih senzora koji koriste Global Positioning System (GPS) ili nekih drugih sofisticiranijih senzora. Kao priprema za eksperiment na moru, planiramo numerički istražiti mogućnost i performanse korištenja ad-hoc mjerenja brzine točke u moru pri upotrebi HEDAC-a. Ovaj bi istraživački zadatak trebao omogućiti utvrđivanje najprikladnije i najprimjerenije metode interpolacije raspršenih mjerenja za procjenu distribucije dinamike mete na morskoj površini. Sasvim je jasno da će upotreba polja brzine zasnovanog na mjerenjima rijetkog raspršenja pogoršati performanse HEDAC-a u odnosu na korištenje detaljnog polja brzina. Međutim, opravdano je vjerovati da će uporaba brzine morske površine interpolirana iz raspršenih podataka donijeti veće stope otkrivanja mete u usporedbi s konvencionalnim pretraživanjima koja se oslanjaju na stalne i često jednolike raspodjele meta. Najsuvremenije metode strojnog učenja će se primijeniti i trenirati kako bi se povećala stopa otkrivanja mete. Predložena RDF rekonstrukcija polja brzine na temelju mjernih podataka poslužit će kao realan model gibanja te će se naknadno koristiti kao ulaz za ML kako bi se precizno procijenila pozicija mete.
Cilj 3. Robusna kontrola bespilotnih letjelica za oceanske pretrage i spašavanje
Jedan od glavnih izazova ovog projekta je prilagodba HEDAC metode upravljanja kako bi se UAV usmjerio prema nestabilnim distribucijama vjerojatnosti mete. Temeljni element trenutnog HEDAC-a je kontrola vremenskog koraka koji uzima u obzir jednoliku distribuciju mete i promjenjivo postignuto pretraživanje. Izgrađeno potencijalno polje već ovisi o vremenski promjenjivom pretraživanju (procjenjuje se iz gibanja UAV-a) pa se s velikom pouzdanošću može računati na uspješnu nadogradnju HEDAC kontrole s obzirom na nestabilnu distribuciju mete. Oba pristupa prikazana u zadatku 1 kompatibilna su za uključivanje u HEDAC i testiranje u simulacijama, kao i kasnije u terenskim pokusima na tlu i moru.
Kako bi se HEDAC prilagodio upotrebi s fizičkim UAV-ovima, kontrolna metoda trebala bi biti u stanju prevladati bilo kakve nepredvidive mehaničke ili druge neispravnosti robota i njegove opreme. Jedna od najočitijih karakteristika metode upravljanja rojom UAV-a, koja je presudna za performanse u stvarnom svijetu, je mogućnost automatskog uključivanja i isključivanja UAV-a iz roja u bilo kojem trenutku tijekom njegovog rada. To može omogućiti održavanje, ponovno punjenje ili jednostavno povećanje ili smanjenje naleta UAV-a kad god je to potrebno. HEDAC metoda vodi agente koji koriste zajedničko potencijalno polje, pri čemu se smjer svakog sredstva određuje prema njegovom gradijentu na trenutnom mjestu agenta. Stoga, dodavanje ili uklanjanje agenta iz roja pretraživanja ne bi trebao imati nepoželjni učinak na proračun potencijalnog polja ili na kontrolu kretanja ostatka roja. Plan je napraviti fleksibilnu i robusnu implementaciju računalnog programa dinamički mijenjajućeg broja agenata u roj.
Cilj 4. Razvoj numeričkih rješavača za HEDAC
Trenutno se jednadžba topline u HEDAC metodi rješava korištenjem MKR s jednoličnom pravokutnom numeričkom mrežom na pravokutnoj domeni. Kakoje ovo jedna od najjednostavnijih metoda za rješavanje parcijalnih diferencijalnih jednadžbi, uporaba naprednijih numeričkih metoda može donijeti mnoga poboljšanja, poput bolje točnosti rješenja i sposobnosti rada s nepravilno oblikovanim domenama. Upotreba nepravilnih domena može donijeti značajna poboljšanja performansi jer može isključiti nepotrebne proračune na nekim dijelovima prostora za pretraživanje, poput kopna i otoka u misijama pretraživanja na moru. Još jedna prednost korištenja nepravilnih domena je postavljanje odgovarajućih graničnih uvjeta na unutarnjim granicama koji će omogućiti robusne mehanizme izbjegavanja prepreka. U ovom projektu planiramo implementirati metodu konačnih elemenata (MKE) ili metodu konačnih volumena (MKV) za rješavanje parcijalne diferencijalne jednadžbe topline unutar HEDAC-a te je planirano testiranje višeagentne kontrole pretraživanja s nepravilnim domenama i preprekama.
Cilj 5. Razvoj sustava za fuziju senzora i detekciju meta
Kao što je predstavljeno u Odjeljku b., koristiti će se modul za praćenje ljudi koji u određenim uvjetima radi dobro. Ovaj se pristup prvenstveno oslanja na ručno izrađene značajke kao što su histogram orijentiranih gradijenata (HOG) ili transformacija značajki inverznih razmjera (SIFT) koji mogu izvući vizualne značajke i geometrijsku strukturu meta. Međutim, one su često osjetljive na promjene u okolini (npr. Velike razlike u pogledu ili osvjetljenju).
Nedavna dostignuća u dubokom učenju (naročito duboke konvolucijske (CNN) i ponavljajuće neuronske mreže (RNN)) pokazala su da je pristup “end-to-end” učenjem cjelovit i bolji nego gore spomenuti pristup koji koristi ručno izrađene značajke [girshick2014rich] te da učinkovito bilježe prostorno-vremenske informacije. Dobro trenirani modeli već nadmašuju semantičko razumijevanje čovjeka u određenim zadacima (npr. prepoznavanje i otkrivanje predmeta). Inspirirani time, planiramo razviti robustan model praćenja mete temeljen na CNN-u i RNN-u. Poravnati komplementarni senzorski sustavi (tj. vizualne i toplinske slike) šalju se CNN-u radi otkrivanja cilja i RNN uključuje izlaz detekcije u vremenski konzistentne informacije (praćenje).
Cilj 6. Eksperimentalna validacija kopnene pretrage u stacionarnim uvjetima
Zadaci pretraživanja UAV-a već su izvršeni korištenjem raznih odgovarajućih hardverskih i softverskih uređaja. Ovim projektom predlažemo korištenje alternativne metode upravljanja kretanjem UAV-a (HEDAC) koja je u provedenim simulacijama pokazala značajno superiorne performanse pretraživanja u usporedbi s konvencionalnim metodama i strategijama. Kako bi se dobili još jači dokazi o ovoj prednosti, potrebno je provesti HEDAC kontrolu nad stvarnim bespilotnim vozilima i eksperiment na terenu. Kao prvi zadatak eksperimentalne validacije planiramo izvoditi eksperimente pretraživanja terena u stacionarnim uvjetima. U okviru ovog zadatka testirat ćemo: HEDAC kontrolu UAV-a u stvarnom okruženju, upotrebu heterogenih UAV-ova, automatsko uključivanje i isključenje UAV-a iz pretraživanja, opremu i softver za detekciju meta i mnoge druge pojedinosti koje mogu pružiti robusniji i efikasniji sustav pretraživanja s više UAV-a. Planiramo izvesti mnogo takvih eksperimenata, jer oni nisu financijski zahtjevni. Stalno testiranje pretraživanja pomoću umjetnih meta i stvarnih ljudi provest će se na prikladnom terenu u blizini institucije podnositelja zahtjeva. Budući da kopneni eksperiment donosi manje rizika i jednostavnije ga je izvesti, ovaj će korak poslužiti kao priprema za posljednji zadatak ovog projekta koji vrši pretragu nestabilnih meta na morskoj površini.
Cilj 7. Eksperimentalna validacija oceanske potrage i spašavanja
Posljednji zadatak, obuhvaćajući i rezultate ostvaren u prethodnim zadacima, eksperimentalna je simulacija pretraživanja i spašavanja na moru. U tu će svrhu na Jadranskom moru biti organizirana najmanje dva terenska eksperimenta u organizaciji hrvatskog partnera. Poboljšana metoda HEDAC koristit će se za vođenje više UAV-ova u potrazi za umjetnim plutajućim metama. Da bi se poboljšala učinkovitost pretraživanja, uzet će se u obzir nestabilno stanje pomoću plutajućih GPS senzora za procjenu dinamike morskih struja. Kao testne mete koristit će se realistične plutajuće plastične lutke. UAV će biti opremljeni odgovarajućim senzorima vizije i ugrađenim procesorima za otkrivanje ljudi na morskoj površini. Model koji se koristi za otkrivanje i praćenje meta ispravno će se prilagoditi i obučiti na unaprijed snimljenim podacima pretraživanja mora. Eksperimenti su planirani za kasno proljeće i ranu jesen kako bi se povećala šansa za pogodne vremenske uvjete.
Očekivani rezultati
Napredak istraživanja pratit će se kroz godišnja izvješća koja pripremaju svi članovi istraživačkog tima koji opisuju rad i studiju koja se obavljaju u svakoj godini projekta. Planirano je da nekoliko zadataka obuhvaća nekoliko godina trajanja projekta, a godišnja izvješća će uključivati kontinuirani napredak postignut za svaki cilj.
Cilj 1. Procjena distribucije mete
Računalni model koji može osigurati dinamički promjenjivu distribuciju gustoće mete na temelju polja brzine dostupnog za cijelu domenu.
Cilj 2. Procjena brzine morske površine pomoću rijetkih mjernih točaka
Složen računski model zasnovan na strojnom učenju i RDF-u koji omogućava rekonstrukciju polja brzina u cijeloj domeni pretraživanja na temelju dobivenih raštrkanih mjerenja brzine u stvarnom vremenu. Strojno učenje treba biti kalibrirano za određenu domenu i dostupne rezultate mjerenja i RDF simulacija. Kao rezultat ovog cilja očekuje se barem jedan rad na konferenciji ili u časopisu.
Cilj 3. Robusna kontrola bespilotnih letjelica za oceanske pretrage i spašavanje
Uspostavljena flota UAV-a koja se daljinski kontrolira algoritmom izvedenim u računalu radne stanice. Sustav može prenijeti fotografije i / ili toplinske slike snimljene UAV-om u središnju upravljačku jedinicu. Telemetrija i ostali sekundarni podaci također se kontinuirano prenose u središnju jedinicu. Središnja jedinica može istovremeno poslati upute za letenje na više UAV-ova.
Cilj 4. Razvoj numeričkih rješavača za HEDAC
Rezultat ovog cilja je implementacija HEDAC algoritma na bazi metode konačnog volumena ili metoda konačnih elemenata. Algoritam treba biti u mogućnosti voditi pretragu na nepravilno oblikovanim domenama i trebao bi podržavati dodavanje prepreka kao „rupa“ u domeni. Implementacije bi trebalo temeljito testirati računalnim simulacijama. Kao rezultat ovog cilja očekuje se barem jedan rad na konferenciji ili u časopisu.
Cilj 5. Razvoj sustava za spoj senzora i detekciju meta
Pripremit će se postupak strojnog učenja za prepoznavanje meta u foto / toplinskim slikama. Temeljito ispitivanje, za različite visine, kuteve i brzine UAV-a formirat će procjenu stope detektiranja mete za određene postavke, koja će se kasnije koristiti kao parametar agenata u postupku pretraživanja pod nadzorom HEDAC-a. Istražit će se prednosti korištenja termalne kamere (samostalno ili uz RGB kameru) i unutarnje obrade detekcije. Kao rezultat ovog cilja očekuje se barem jedan rad na konferenciji ili u časopisu.
Cilj 6. Eksperimentalna validacija kopnene pretrage u stacionarnim uvjetima
Rezultati kopnenih eksperimenata su telemetrijski podaci UAV-a, HEDAC-ovi posredni rezultati, zabilježene fotografije i toplinske slike te rezultati otkrivanja. Svi prikupljeni podaci trebaju biti dovoljni za eksperimentalnu provjeru simulacije višeagentnog pretraživanja i potvrđivanje visoke učinkovitosti HEDAC-a za pretraživanje u stacionarnim uvjetima. Kao rezultat ovog cilja očekuje se barem jedan rad na konferenciji ili u časopisu.
Cilj 7. Eksperimentalna validacija oceanskog traženja i spašavanja
Rezultati morskih eksperimenata su podaci telemetrije UAV-a, lokacije i očitanja plutajućih senzora, parametri za rekonstrukciju strujnog polja pomoću strojnog učenja, posredni rezultati HEDAC-a, snimljene fotografije i toplinske slike te rezultati otkrivanja. Svi prikupljeni podaci trebaju biti dovoljni za eksperimentalnu provjeru simulacije višeagentnog pretraživanja i potvrđivanje visoke učinkovitosti HEDAC-a za pretraživanje u nestacionarnim uvjetima. Kao rezultat ovog cilja očekuje se barem jedan rad na konferenciji ili u časopisu.